
Robot mobili
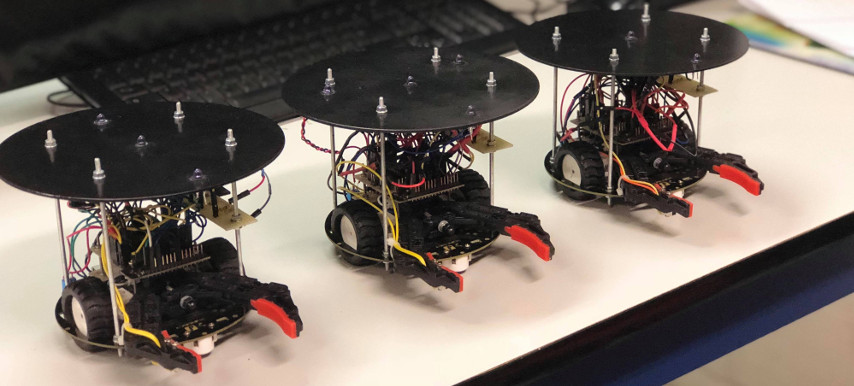
Tre robot mobili con Arduino e regolatore in linguaggio C su Raspberry
Proposta di tesi: modellizzazione, controllo avanzato MPC, modifiche hardware e meccaniche
Controllo Pure Pursuit Embedded di traiettoria (2018)
Controllo Pure Pursuit di traiettoria di due robot con prelievo e scarico oggetti (2018)
Stazione di ricarica (2018)
Buffer di deposito (2018)
Controllo automatico di traiettoria (Versione 2016 del robot)